



Un equipo de investigadores de la Universidad Johns Hopkins y otros lugares dice que su robot pudo realizar un procedimiento quirúrgico complicado y delicado en un Cerdo sin la ayuda de los humanos por primera vez. Además, el robot incluso parecía hacer el trabajo mejor que los cirujanos humanos.
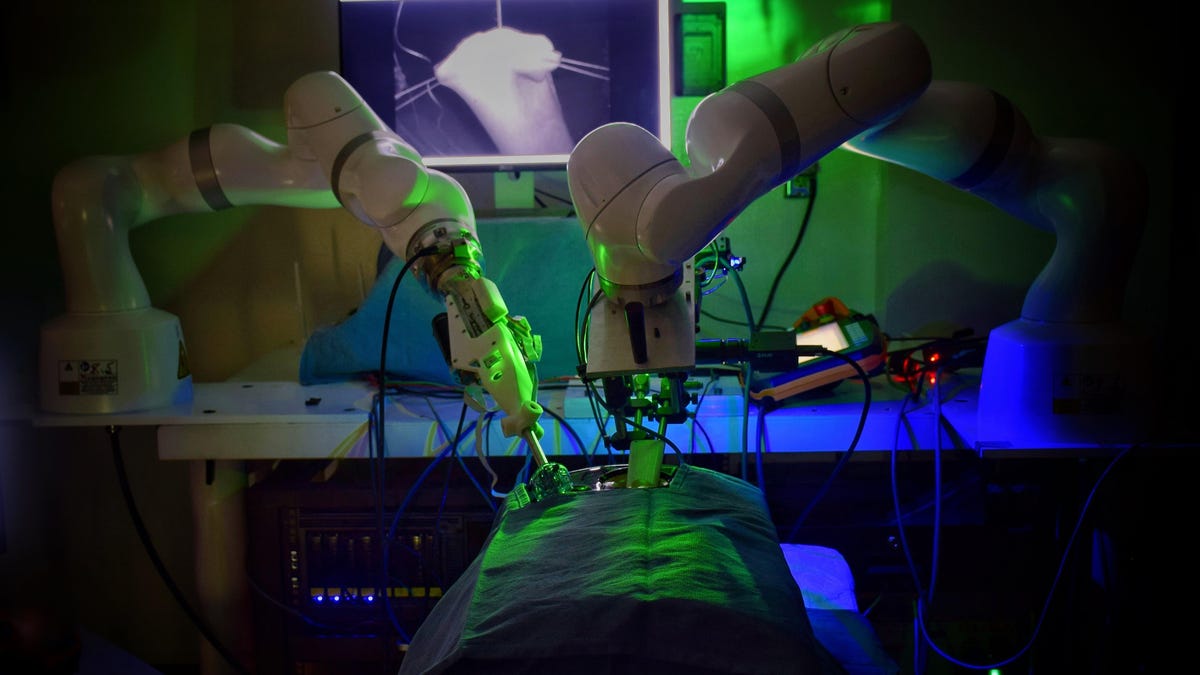
El uso de robots en el quirófano no es nuevo, pero tecnologías actuales de uso generalizado, como sistema da vinci, todavía están controlados por un cirujano humano. El sistema de robot autónomo Smart Fabric, también conocido como STAR (Robot autónomo de tejido inteligente), que está siendo desarrollado por Axel Krieger junto con sus colegas, es diferente.
“STAR es el primer sistema robótico que planifica, adapta y ejecuta un plan quirúrgico de tejidos blandos sin intervención humana”, dijo. gizmodo en un correo electrónico Krieger, profesor asistente de ingeniería mecánica en Johns Hopkins.
A lo largo de los años, Krieger y su equipo han probado que STAR puede realizar importantes tareas quirúrgicas tan bien o incluso mejor que los cirujanos humanos, aunque todavía con algo de participación humana. En su última investigación, publicada en ciencia robóticapresentan datos que muestran que STAR puede realizar de forma autónoma cirugía compleja de tejidos blandos en cerdos por vía laparoscópica, es decir, realizada con solo pequeñas incisiones.
El procedimiento se conoce como anastomosis del intestino delgado y requiere volver a conectar los extremos de un intestino (esto podría ser necesario si se extirpa parte del intestino para tratar un tumor, por ejemplo). Es una cirugía que requiere delicadeza y precisión, ya que hasta un pequeño error puede dejar fugas. Trabajar con tejido blando, a diferencia de estructuras rígidas como el hueso, es un desafío para cualquier cirujano, ya que es posible que deba ajustarse sobre la marcha a medida que se mueve por el cuerpo.
Pero en estas pruebas, que involucraron a STAR operando en cuatro cerdos, el robot pareció pasar con gran éxito. En comparación con los datos obtenidos de operaciones realizadas por humanos, informó el equipo, se encontró que las suturas y los puntos de STAR eran más precisos y consistentes. Tampoco se detectaron fugas en los cerdos operados.
La automatización de STAR para llevar a cabo este tipo de tarea compleja requirió varias innovaciones, dijo Krieger. Las herramientas quirúrgicas estándar necesitaban ser modificadas para ser utilizadas por STAR, por ejemplo. El robot también estaba equipado con una combinación de cámaras de luz de estructura y de infrarrojo cercano para reconstruir una imagen tridimensional del sitio quirúrgico, y requería programación para crear un plan quirúrgico que pudiera ajustarse según fuera necesario para tener en cuenta cosas como bloqueos en el pañuelo de papel. . Pero los resultados indican que construir un robot quirúrgico autónomo es más que posible y “no solo un producto de la imaginación”, dijo Krieger.
Sin embargo, en el futuro previsible, STAR y robots similares seguirán desempeñando el papel de asistentes de los cirujanos humanos, en lugar de asumir el control por completo. Pero incluso esto podríaser un gran paso adelante para hacer que las cirugías sean más seguras al permitir que los cirujanos estandaricen mejor operaciones complicadas como una anastomosis, una tarea que se realiza más de 1 millón de veces al año solo en los Estados Unidos, según Krieger. El investigador y su equipo también esperan que sistemas como STAR puedan revolucionar otros procedimientos difíciles de tejidos blandos, como las resecciones de tumores. Y visualizan un futuro en el que “los sistemas de cirugía robótica autónoma podrían ayudar a tratar a los pacientes fuera de un entorno hospitalario normal, por ejemplo, en situaciones de trauma en el camino al hospital”.
Mientras tanto, el equipo planea mejorar aún más STAR y sus capacidades. En los experimentos actuales, por ejemplo, el robot aún requería la colocación manual de marcadores en los tejidos del cerdo para ayudar en su seguimiento. Ahora han comenzado a trabajar en un enfoque sin marcadores que debería poder hacer que las cámaras del robot sean menos voluminosas y que la planificación quirúrgica sea más simple.

